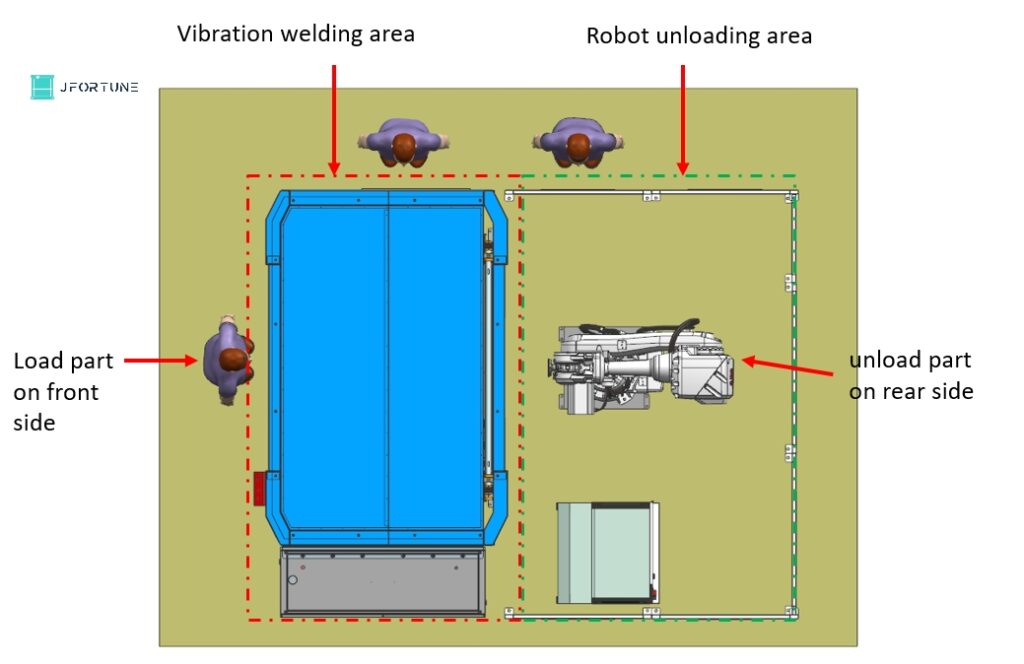
로봇 진동 용접기 는 진동 용접 영역과 로봇 언로딩 영역의 두 부분으로 나뉩니다. 2. 장비 흐름: 수동으로 제품을 전면의 진동 기계에 넣고 용접이 완료되면 로봇이 제품을 언로드하여 생산 라인에 넣습니다.
외부 기계
용접 프로세스
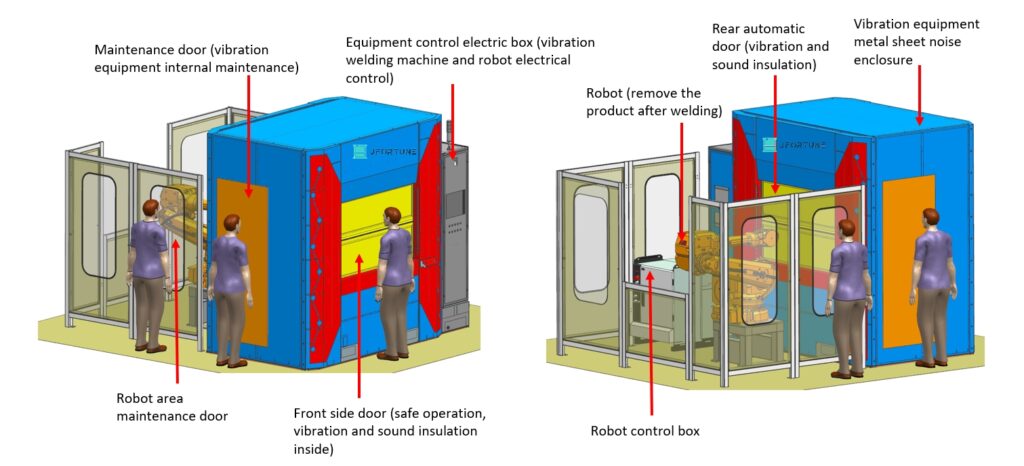
로봇 진동 용접기 전체 프로세스: 제품을 진동 장비의 하단 네스트에 수동으로 넣습니다. - 시작 스위치 - 스캔 코드 건으로 제품 테스트 - 서보 모터로 구동되는 전면 도어가 안전하게 닫힘 - 테이블 서보 모터 구동 하부 테이블 상승 - 진동 헤드가 진동하기 시작 - 테이블 서보 모터 구동 하부 테이블 내려감 - 후면 도어의 서보 모터 구동으로 열림 - 로봇이 하부 테이블에서 제품 언로드 - 로봇이 후면 도어 서보 모터 구동으로 닫힘 - 로봇이 제품을 후면 생산 라인에 넣습니다.
로봇 진동 용접 공정 는 인간과 기계의 잘 조율된 춤과 같습니다. 이 모든 것은 사람이 제품을 기계의 특정 영역에 넣는 것으로 시작됩니다. 그런 다음 버튼을 누르면 모든 것이 시작됩니다.
특수 스캐너가 제품을 검사하여 사용 가능한 상태인지 확인합니다. 이 작업이 완료되면 기계 전면의 도어가 모터를 사용하여 부드럽게 닫힙니다. 이 문은 내부의 모든 것을 안전하게 지켜줍니다.
다음으로 기계의 일부가 위로 이동하여 제품을 들어 올립니다. 동시에 진동 도구가 제품을 흔들기 시작합니다. 이 흔들림은 제품의 부품이 서로 잘 붙도록 도와줍니다.
흔들기가 끝나면 기계 부품이 아래로 이동하고 뒤쪽의 문이 열립니다. 이 문을 통해 로봇이 들어옵니다. 로봇은 조심스럽게 제품을 가져와 기계 밖으로 나갑니다. 그 후 뒷문은 다시 닫힙니다.
그런 다음 로봇은 더 많은 작업이 이루어지는 다른 장소로 이동합니다. 로봇은 다음 단계의 제품 제작을 위해 필요한 곳에 제품을 배치합니다. 이 모든 과정은 사람과 로봇이 어떻게 협력하여 제대로 된 제품을 만들 수 있는지 보여줍니다. 이는 마치 개별 부품을 튼튼하고 완성된 제품으로 바꾸는 기술의 춤과도 같습니다.
진동 헤드 시스템
진동 헤드는 빔 스프링 4세트와 전자석 및 구동 플레이트 2세트로 구성됩니다. 진동 헤드 시스템이 작동하려면 표준 도구와 일치해야 합니다.